上級会員になろう!というわけで?、SNSなどで見かける"Set slide bar!"行ってきました。Dash 8だけでプレミアムポイント(以下PP)を稼ぐのは私には厳しすぎるガチ修行になるのでコスパ等を考えて定番といわれるITM-OKAを日帰りも辞さずひたすら往復する通称OKAタッチになりました。京都の厳冬期の1~2月が閑散期(Lシーズン)で定時運航率が高く、暖かい地域なので体調の面での不安も小さいです。
また、2024/3/30まではB787-8 (78P)で時刻表上は確定しているので新世代中型機で快適な移動が期待できます。78Pの弱点はプレミアム座席が12席だけで確実に抑えるにはかなり前から予約を入れる必要があります。軽トラにして自動車維持費を浮かせるだけではとても足らず、冬のボーナスを全部ぶち込む覚悟が必要でした。体力的にも厳しく、時間も取れないので容赦なく運賃1(SKYコインは使う)で30,000PPまでは稼ぎます。PP単価?何それ?です。体力と時間がある方はどうぞ。チェックイン締切1時間前を切って発券して往路がBN 221、復路188でしたので閑散というには搭乗率は高かった(なぜか往路はほぼ満席)のが謎です。
伊丹空港(ITM)は何度も利用しているので特に問題なく、ようやく地上から中・大型機を眺めるだけではなく乗ることができました。B787-8自体はDash 8と比べて広さや揺れ、騒音面で快適ですけど対地速度が速すぎる(x1.5~2倍速)ので窓側席でもボケっとしているとあっという間に景色がすっとんで行きます。室戸岬から足摺岬まで120kmぐらい?がわずか10分ちょいです。さらに、飛行高度もプロペラ機が飛ぶ17,000~21,000 feet付近と38,000~41,000では対流圏界面の影響か見え方が異なり日中は常に太陽が出るため雲からの照り返しもでてきます。離着陸のため境界面を通過する際や低空ではそれなりに揺れるのでベルトサインが早めに点くようです。
初のB787で最後にB767に乗ってから20年近く経つ(今でも767が現役なのは驚き)ので機内トイレの仕組みがよくわからず、サングラスのせいでほとんど見えなくて入口のドアロック方法が出るときになって気づいてロックすると照明が点くのに気づきました。ANAとジャムコ、787にひじ開け式トイレドア 手を触れずに開閉 By Tadayuki YOSHIKAWA(https://www.aviationwire.jp/archives/225672)で紹介されている改修2号機が今回乗ったJA816Aです。初めて乗る方は予習していけば混乱しないで済むかと。
往路便は左側窓側席が取れましたので高知ぐらいまでは地上が雲の合間から見え、沖合に出て高高度に上がると離島がたまに見えました。私が窓から四国を離れて確認できたのは種子島、奄美大島(雲で一部のみ)、喜界島、沖縄本島の北側西岸、南側少し、慶良間諸島(高度が低くて東側のみ)です。第十管区海上保安本部と第十一管区海上保安本部が管轄する広大な海域です。機内アナウンスであった桜島の噴煙は右側席でないと見えません(窓が大きいので中央列ならひょっとしたら?)。奄美辺りでほぼ同じ高度を別の旅客機とすれ違ったのですけど、ものすごい速さでPixel7aで4,5枚撮って影が映っていたのが2コマだけで動画に切り替える時間はありませんでした。奄美大島あたりから高度を下げはじめ沖縄本島を横切って南側を回り込んでB滑走路への着陸でTALEXサングラスの本領発揮で海面越しにサンゴ礁がよく見えました。
 往路軽食。
往路軽食。
那覇空港(OKA)は修行僧の方々は制限エリアを出ずにカウンターで手続きして乗り継ぎで折り返すようです。けろりと「(プレミアム)ポイントのためだけに乗りました!」と即答できる強い心の持ち主が向いてます。今回初訪問となるOKAのフロアマップを見て折り返しのわずかな時間でどこまで回れるか?初めから制限エリア内だけで乗り継ぎ(※)は避けたいとを考えていました。ジェット機の折り返しで時刻表上は1時間でも保安検査10分、ゲート前集合10分を考えると実質40分がギリギリです。けど、私は空港内も見てみたく制限時間約40分で回るには空港が広いので厳しいです。
※当ブログでは(OKA)タッチは制限エリアから出ても出なくても出発地へ直後の便で折り返した場合はタッチ扱いとします。修行僧界隈は限界極め過ぎな気がしまして通常の旅程では伊丹から沖縄を日帰りするのも珍しいかと思います。がんばれば朝一便発→最終便で帰るのも理論上は可能ですけど私は体力的に無理と判断しました。
更に搭乗口は2F、到着口が1Fで一旦出て、出発カウンターが3F(紙の搭乗券を発券する場合)、出発口が2Fなので2F->1F->3F->2Fとバタバタと移動することになります。アプリでQRコードで搭乗券を表示するにしても2F, 1F, 2Fの移動となります。自動チェックイン機がどこにあるのか?わからず(2Fにあるかと思ったら3Fだった)無駄に歩き回ったためお店に入る時間が無くなりました。あと、エスカレーターの場所は確認できましたけど階段がどこか?もわかりませんでした。(次回への課題)
さらに、プレミアムクラスおまけの専用保安検査場の入り口が分かりにくく通常の検査場B, Cの間の壁に目立たない(Web公開PDFフロアマップに書いていない)自動ドアがあります。一度通り過ぎて戻ったところにたまたま他の方が入っていったので助かりました。せっかくなので足早にANA LOUNGEも入ってみましたけどのんびりする暇はなく飲み物だけいただいて(隣の方は名物青汁!いってた)先ほど降りたのと同じ搭乗口へ。修行僧であっても空港の設備把握は重要なので初回訪問時ぐらいは折り返し便にせず時間に余裕を持ったほうがいいと思いました。往路では機内WiFiに接続できず、復路は窓側席を取れなかったのでWiFiとるべしということで早めに列に並んで着席即接続で昨年から8便目(今年3便目)にして初めて上空からWiFiを利用することに成功しました。なんでGroup1,2にずらずら並んでいるのか?謎でしたけどジェット機のWiFiを確実につかむためだった?ようです。Dash 8には外部に接続できるサービス自体無い(一応機内で閉じたWiFiはあったような?)ですけど。
折り返し便名物?と化しているCAさんの「先ほどもお会いしましたね?」確認と「今日はこれで最後ですか?」確認(さすがに再度折り返した上にステイは私は無理)はさらっと答えました。初見の那覇空港内で迷子になりかかって滑り込んだので頭回っていなかったです。まぁ、今後の予約では折り返し2便とも同じ席というのもあったはずで図太い人向きです。メンタルが弱いと上級会員になっても使いこなせない可能性がありますので敷居は高めに設定されていると思います。
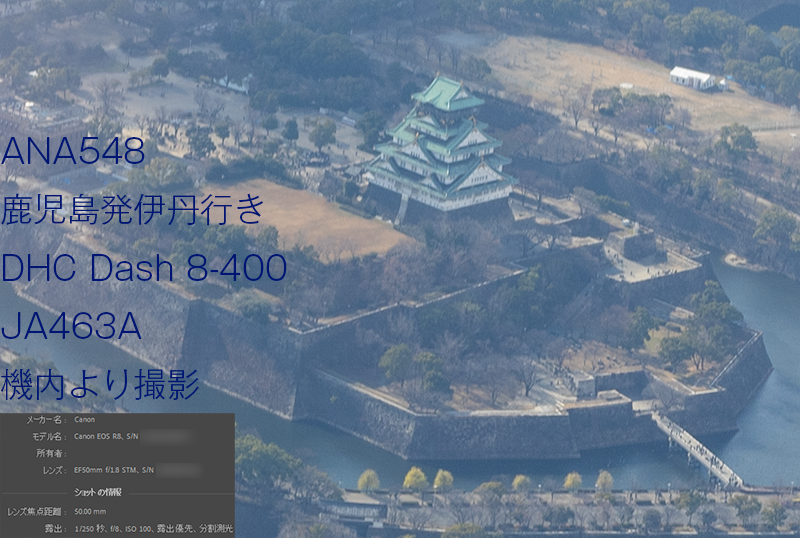
復路便はA滑走路からさくっと離陸して乗員のみなさんと、どうやら少なくとももう一人いた折り返しの方と同じくわずか1時間弱の沖縄滞在となりました。さすがに家族連れで折り返すようなことは無くもう一人の方はダイヤ維持目的らしい慣れた方でした。復路航路は通常のKOJ->ITMと似た形で高知沖から紀伊水道を通って着陸ルートにはいるはずが吉野山方向へ向かって時間調整、幸い半周しただけで定刻より少し早めに到着しました。
 復路昼食。
復路昼食。
無理そうな感じがしたのでいったんキャンセルしたDash 8の30分での折り返しはやはり無謀だったと思うので再検討の余地があります。
 伊丹からの軽食
伊丹からの軽食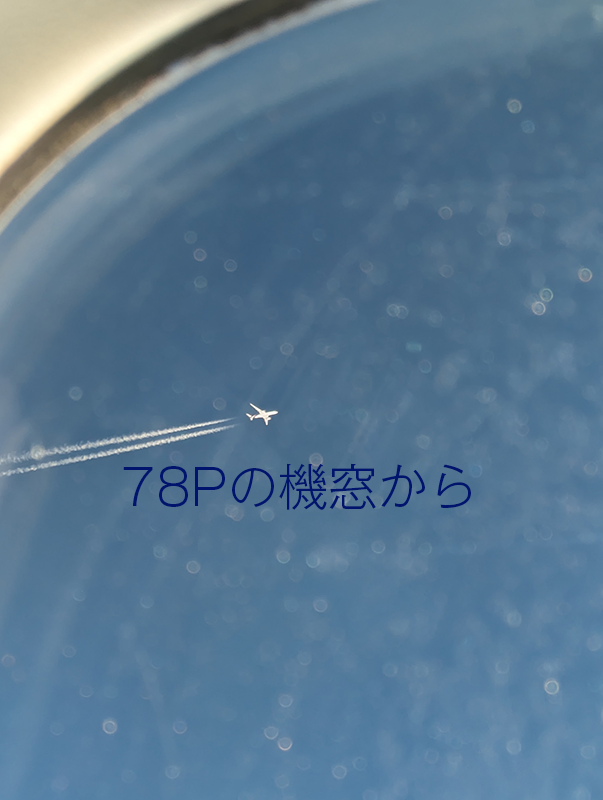 機窓から見えた上方にすれ違う旅客機
機窓から見えた上方にすれ違う旅客機 那覇からの昼食
那覇からの昼食