WP本体を6.2-jaへ、WP用テーマLuxeritasを3.23.2から3.23.3へ更新しました。Luxeritas 3.23.3でWP 6.2に関する対応が入っています。詳細は開発元のWP 6.2 対応 & ブラジルポルトガル語対応 Luxeritas 3.23.3(https://thk.kanzae.net/dev/wp-themes/luxeritas/t14111/)を参照してください。
WordPress 6.1.1-ja、Luxeritas 3.23.2へ更新
WP本体を6.1.1-jaへ、WP用テーマLuxeritasを3.23.0から3.23.2へ更新しました。Luxeritas 3.23.2でWP 6.1に関する対応が入っています。詳細は開発元のWP 6.1 で AMP エラー出るので修正 Luxeritas 3.23.2(https://thk.kanzae.net/dev/wp-themes/luxeritas/t14103/)から過去更新分を参照してください。
Google Pixel6a購入
約1年半使った2021年4月3日購入のPixel4aから、Google Pixel6aへ買い替えました。Pixel4aを下取りに出すことで大幅に安く購入できました。まずは、自宅内でWiFi5(ac)とWiFi6(ax)でかなり差が出るのでできるだけax化したいのが一点。次に、n78(3.5GHz帯)だけでも5Gをつかめる場所を確認したいというのが4a→6a買い替えの動機です。
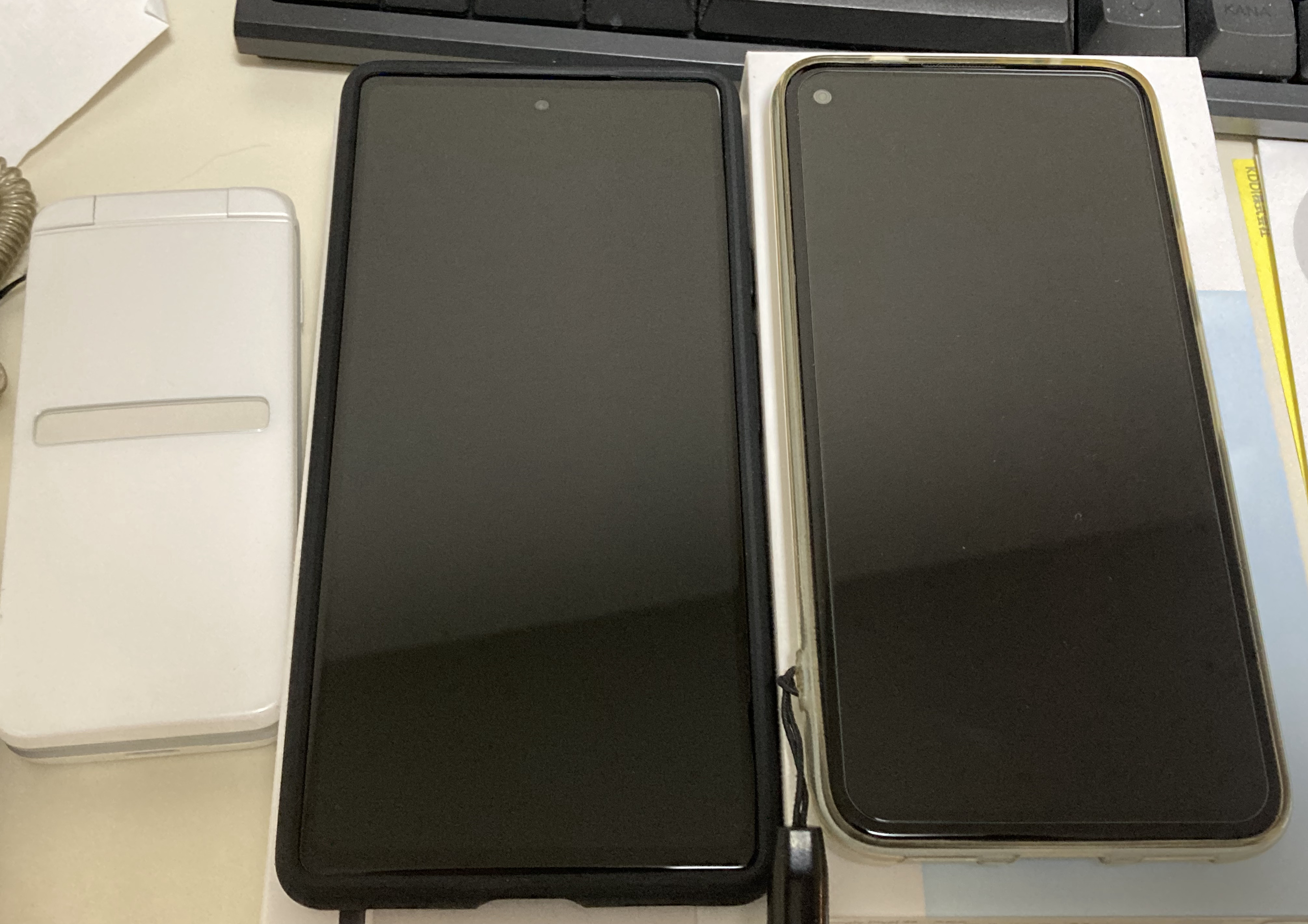 左からKYF39、Pixel6a、Pixel4a
左からKYF39、Pixel6a、Pixel4a
現在も音声通話はVoLTE対応のKYF39(auのSIM)を使用しているため、Pixelはデータ通信&Androidアプリ用の端末です。
機種名:Google Pixel 4a G025M → Google Pixel 6a GB17L
メーカー:グーグル合同会社
対応通信規格: LTE Band1/2/3/4/5/7/8/12/13/17/18/19/20/25/26/28/38/39/40/41/42/66 →
LTE Band1/2/3/4/5/7/8/12/13/17/18/19/20/25/26/28/29/30/38/39/40/41/42/48/66/71
5G Sub-6: n1/2/3/5/7/8/12/20/25/28/30/38/40/41/48/66/71/77/78
サイズ(高さ×幅×厚さ):144x69.4x8.2 mm → 152.2x71.8x8.9 mm
重量:143g → 178g
バッテリ容量:3140 mAh(交換不可) → 4410 mAh(交換不可)
CPU:Qualcomm® Snapdragon™ 730G4 8core/2.2 + 1.8 GHz → Google Tensor & Titan M2™ セキュリティ コプロセッサ
RAM:6GB
ROM:128GB
ディスプレイ:5.8インチFHD+(1080x2340) OLED → 6.1インチFHD+(1080x2400)
カメラ:12.2 Mpixel
箱によればDesigned by Google, Phone made in Vietnam
だけになりPixel4aで書いてあったAccessories made in Chinaの表示は無くなりました(付属の充電器も無くなりました)。Pixel6a本体を持った感じではサイズはほとんど変わった感じがしませんが重さはずっしりと重く感じました(※個人の感想です)。
イオンモバイルのSIMで5G (たぶんNSAのみ)を使うには設定変更が必要です。5G ONで3Gは使えなくなったり、あれこれ制限がありますが、最近の様子を見ている限り3Gに落ちることはまず無いのでONへと切り替えます。
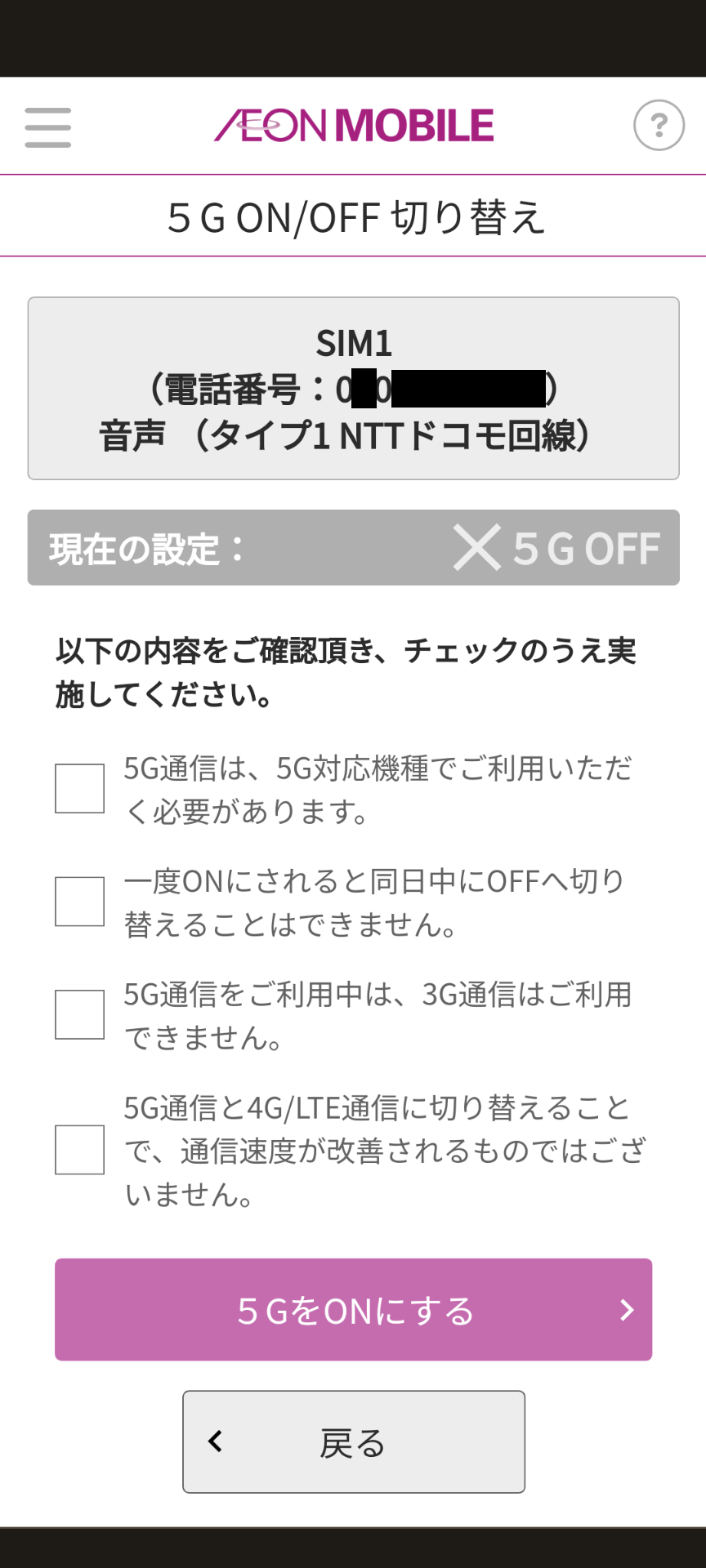 イオンモバイル5G切替
イオンモバイル5G切替
以下、購入&下取り処理の時系列メモ
9月15日:Pixel6a購入&Pixel4a下取り注文
9月21日:Pixel6a着、SIM差し替え&データ移行
9月25日:京都中央郵便局にて下取りキットを受け取り、Pixel4aを発送
10月3日:下取り用スマートフォン(Pixel4a)の査定中メール
10月4日:払い戻し済みの連絡メール
10月7日:下取りによるau walletカードへの返金確認
※au walletプリペイドカードは場合によっては返金処理に非常に時間がかかるらしいですけど、Google Storeでは3日で戻ってきました。
WordPress 6.0.1-ja、Luxeritas 3.23.0へ更新
WP本体を6.0.1-jaへ、WP用テーマLuxeritasを3.21.5.1から3.23.0へ更新しました。Luxeritasは3.22.0.1でWP 6.0に対応しているようです。詳細は開発元のGoogle Analytics 4(GA4)の AMP 仮対応 Luxeritas 3.23.0(https://thk.kanzae.net/dev/wp-themes/luxeritas/t14066/)から過去更新分を参照してください。
おんどとりTR-72wf接続用OpenWrt設定
おんどとりを接続させるWiFi APにOpenWrtを使用する場合、
Network -> Wireless -> 該当SSID横のEdit -> General Setupタブの
Allow legacy 802.11b rates(下図参照)を有効にしなければ接続できませんでした。

市販ルーターでこれが無効になっている製品を私は見たことが無い(= OpenWrtに書き換える前は接続できていた)のですが書き換え後にはまって手間取りました。
Xserver 新サーバー簡単移行完了
昨年10月にアナウンスがあった従来の3倍以上の性能に! さらなる超速化でサーバー速度は圧倒的No.1へ! 高速環境「KUSANAGI」の技術および最新サーバー機器を導入(https://www.xserver.ne.jp/news_detail.php?view_id=8186)の新サーバーへこのブログを移行しました。
約半年様子を見ていたのは忙しかったのといくら圧倒的超高速でもトラブって止まったりしたら更に面倒になるからです。移行後にこの記事を入力していますので読めている方は新サーバーに接続できています。
Luxeritas 3.21.5.1へ更新
久しぶりにWP用テーマLuxeritasを3.21.3から更新しました。開発元の軽い仕様変更2~3個くらい Luxeritas 3.21.5(https://thk.kanzae.net/dev/wp-themes/luxeritas/t13999/)の通り軽微な変更でこのブログへは影響はほぼ無いと思います。
STM32F4xx DMA利用UART通信ではまる
またはまりました。しかし、過去と違ってSTM32には強力なコミュニティがあるためWeb検索で何とかなっています。しかし、これはF4xxの記事では無いためか気づくのが遅くなりだいぶ時間を無駄にしました。
QiitaのSTM32 DMAを使ったUART通信ではまる(https://qiita.com/numeru55/items/fd61922eeec6be62a22a)という記事がヒットしてDMA->USARTの順番に変更することで一応動いたのですけど、リンク先をたどると最近更新された記事がありました。MX_DMA_Init order in the main.c file generated by STM32CubeMX, How to fix?
(https://community.st.com/s/question/0D53W00001EzCmCSAV/mxdmainit-order-in-the-mainc-file-generated-by-stm32cubemx-how-to-fix)という英文記事でADCなどを動かすにはGPIO->DMA->RCC->その他(the rest.)にする必要があるそうです。
この問題のやっかいなところは、いくらプログラムの記述を見直してもわからず、CubeMXの設定を変更する必要があるところです。 Project Manager からAdvanced Settingsタブとわかりにくいところにあります。ついでに順番を変えるボタンも分かりにくいです(半分八つ当たり)。![]() Qiitaの記事の方のようにF3xxにHALだけではなく、F4xx LLでも発生しているため機種やライブラリ依存はほとんどないかと思います。
Qiitaの記事の方のようにF3xxにHALだけではなく、F4xx LLでも発生しているため機種やライブラリ依存はほとんどないかと思います。
やれやれ。
Nucleo-64 USB MSC無効化
Nucleoのボードを動かしたという記事は良く見かけますけど、皆さんUSB Mass Storage Class(以下MSC)でいちいち取り外し作業をしてからUSBケーブル抜いているのでしょうか?
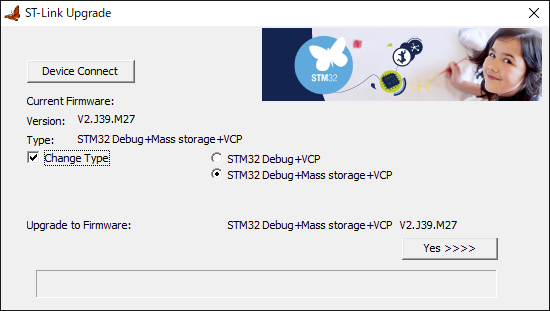
MSC無効化で検索しても出てこなかったのでdisableにしたところ、How to disable USB mass-storage in STLink on Nucleo?(https://electronics.stackexchange.com/questions/287465/how-to-disable-usb-mass-storage-in-stlink-on-nucleo)がヒットしました。STLinkUpgrade用のソフトに切り替えが付いているらしいです。
ST公式サイトのST-LINK, ST-LINK/V2, ST-LINK/V2-1, STLINK-V3 boards firmware upgrade(https://www.st.com/en/development-tools/stsw-link007.html)からソフトを落としてきて、"Change Type"のチェックボックスにチェックを入れ、Mass storage無しの上側に切り替えてからYes>>>>ボタンを押したら消えました。これでいちいち取り外し作業しなくてもFlashに書き込むようなプログラムを入れない限り安心(?)です。私がダウンロードしたのはV3.9.3でした。
MSC無効化後にRapberry Pi4のUSBにつないでlsusbコマンドで見ると以下の通り。
$ lsusb -t
/: Bus 02.Port 1: Dev 1, Class=root_hub, Driver=xhci_hcd/4p, 5000M
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=xhci_hcd/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/4p, 480M
|__ Port 3: Dev 4, If 0, Class=Vendor Specific Class, Driver=, 12M
|__ Port 3: Dev 4, If 1, Class=Communications, Driver=cdc_acm, 12M
|__ Port 3: Dev 4, If 2, Class=CDC Data, Driver=cdc_acm, 12M
Luxeritas 3.21.3へ更新
わずか数日で再更新となりました。WP 5.9 だと AMP でエラー出るので対応 Luxeritas 3.21.3(https://thk.kanzae.net/dev/wp-themes/luxeritas/t13963/)の表題のみの更新だそうです。Googleから指摘のメールが来ていたような気もします。