10/24にメールが届いたまま放置というか様子見にしていたXSERVERのPHPバージョンを7.2から7.3へと変更しました。操作画面を見る限り現行の7.2.17が推奨のままみたいですがWPもテーマのLuxeritusも7.3に対応しているようなので切り替えました。
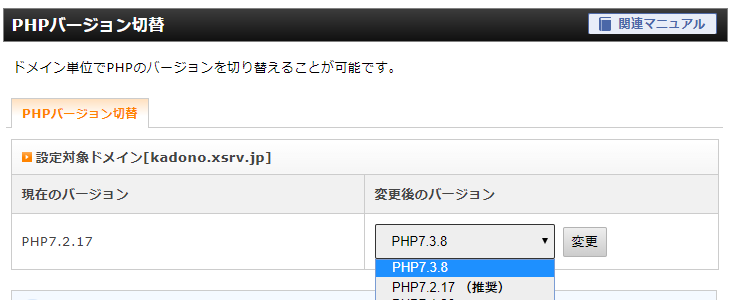 XSERVERのPHPバージョン切替画面(11/2時点)
XSERVERのPHPバージョン切替画面(11/2時点)
元々XSERVERもLuxeritasも十分に高速だと思いますのでこの変更でさらに速くなっても細かく計測しないとわからない可能性が高いです。特にこのサイトは高解像度画像も多く載せているため処理時間より転送時間のほうが支配的ではないかと思います。
XSERVERのPHPバージョンを7.3へ変更しました
MR05LNファームウェアバージョンアップ3.0.0
継続して使用しているモバイルルータMR05LNに去年2月のMR05LNファームウェアバージョンアップ2.1.0(https://kadono.xsrv.jp/2018/02/24/3612)から1.5年以上経ってアップデートデータが配信されてきました。KYF39に機種変更してからはBluetoothは使用せずWiFiのみでの運用になっています。
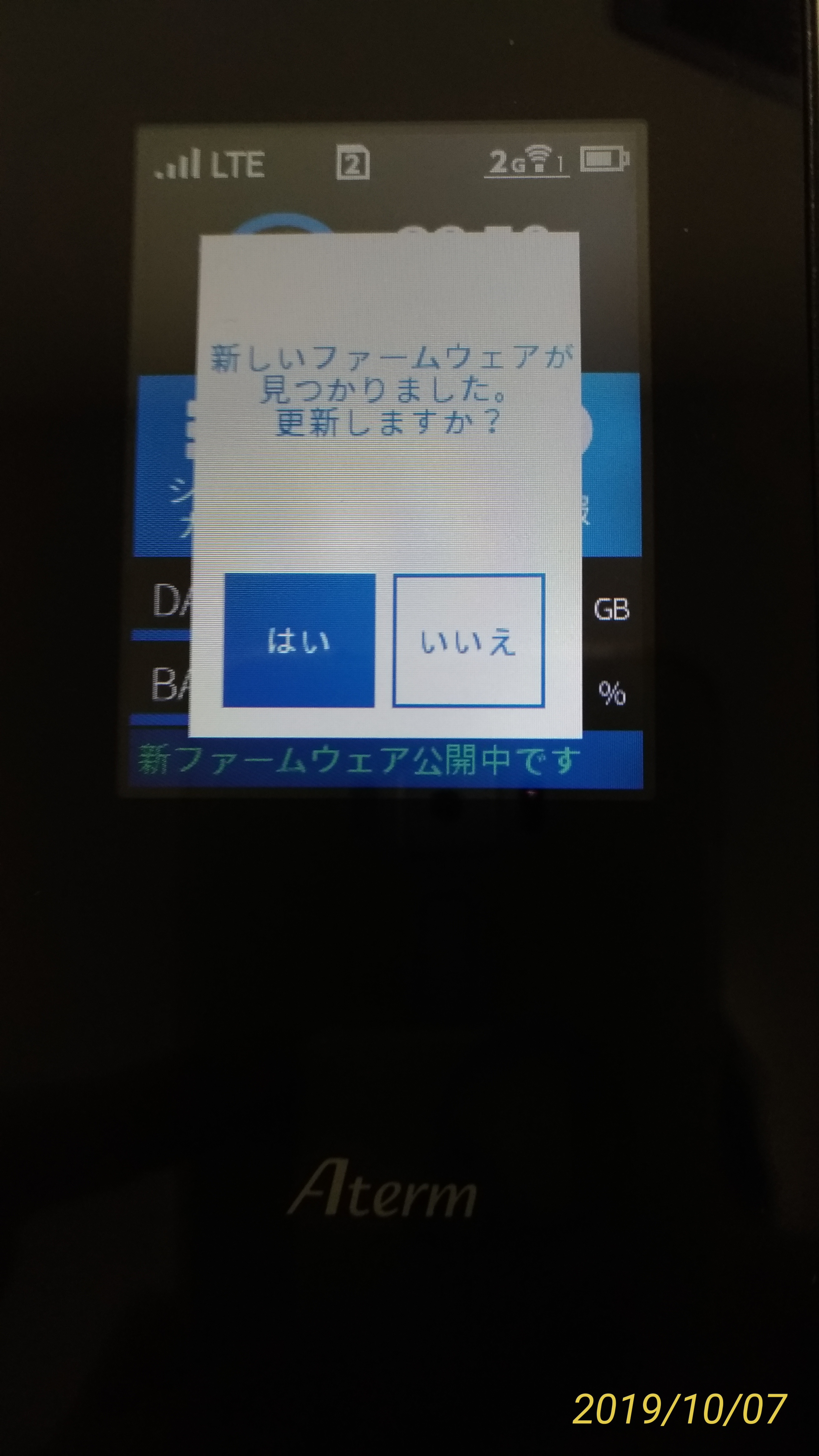 久しぶりの更新表示。
久しぶりの更新表示。
メーカーサイトのMR05LN バージョンアップ履歴
(https://www.aterm.jp/support/verup/mr05ln/hist.html)によると以下の点が変更されています。
Ver3.0.0 (2019/10/01) 楽天モバイル株式会社のサービス「楽天(rakuten.jp)」に対応しました。 言語設定(日本語/英語)に対応しました。(クイック設定web および ディスプレイ) LTE/3Gの接続方式、無線LANの暗号化モードの初期値が一部変更されました。 [*1] 無線LAN子機の同時接続台数を10台から16台に拡張しました。 無線LAN暗号化強化機能に対応しました。 [*2] ディスプレイの端末情報にSIM電話番号を追加しました。 ディスプレイでの国際ローミング設定方法を改善しました。
私の使い方で影響しそうなのは暗号化強化ぐらいでしょうか。同時接続台数はRaspberry Piなどを多数使用していると影響があるかもしれません。
後日追記)今回のアップデートで暗号化方式がWPA2-PSK固定になったようでKYF39はもちろんRaspberry Pi Zero, ZE520KL, TR-72wfなども問題がなかったのですけど、1台だけGWR103sd+SD-WC008Gが通信不能となりました。仕方がないのでセキュリティ的には弱くなるもののWPA/WPA2-PSK(AES)もだめで結局アップデート前と同様と思われるWPA/WPA2-PSK(TKIP/AES)に変更して復帰しました。GWR103sdはプリウスのACCがONの間しか通信しないのと走行している時間が長いため一時的に弱くなっても大きな支障は出ないと思います。GWR103sdのアップデートも無さそうですし、新型に買い換える予定は今の所ありません。SD-WC008Gの仕様も"WEP, TKIP, AES (WPA/WPA2)"というよくわからない書き方(結局ホスト依存?)なのであまり期待できません。
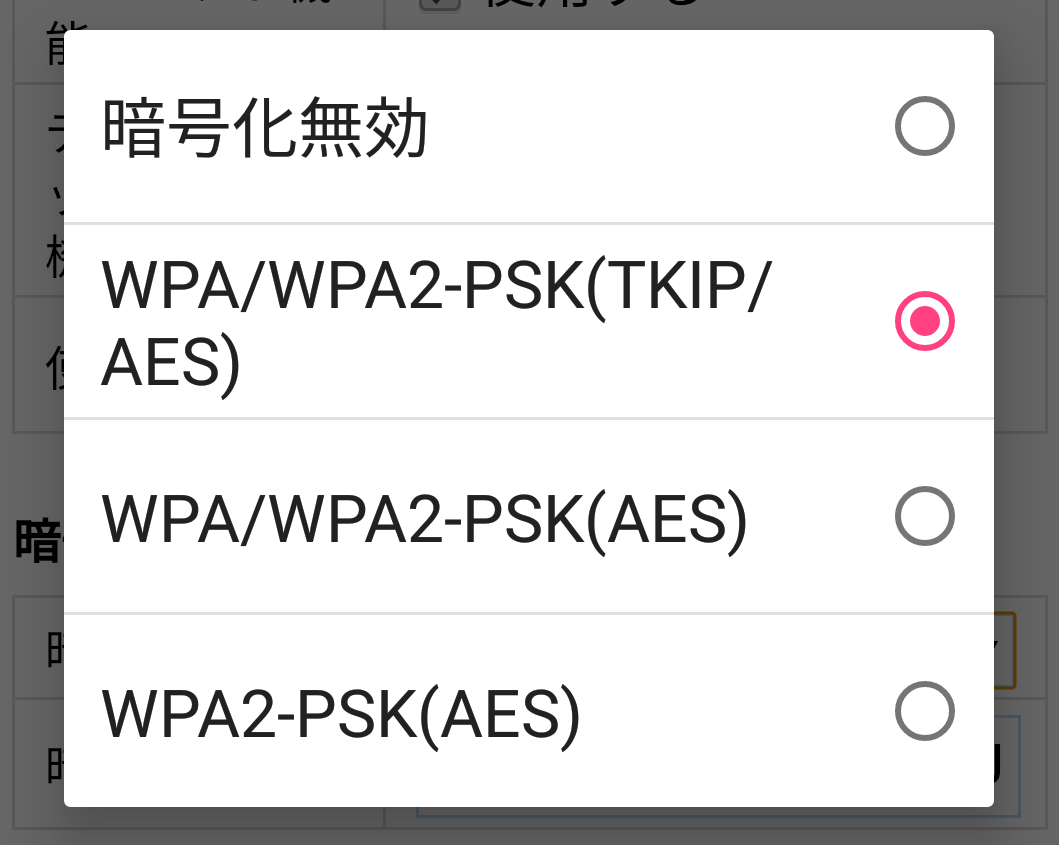 アップデート後WiFi設定変更(支障がなければWPA2-PSK(AES)のままの方が良い)。
アップデート後WiFi設定変更(支障がなければWPA2-PSK(AES)のままの方が良い)。
Luxeritas 3.7.0.2へアップデート
9月中はバタバタし過ぎでほとんどこのサイトのメンテナンスができませんでした。下書きも溜まっています。
とりあえず、WPのテーマをアップデートしました。機能変更や仕様変更も入っているようです。3.7.0.1, 3.7.0.2は細かい修正だけのようなので機能面などの詳細は開発元のLuxeritas 3.7.0 リリース(https://thk.kanzae.net/wp/release/t7872/)を参照してください。
Luxeritas 3.6.13へアップデート
細かい修正が入ったようなのでこのサイトで使用しているWordPress用のテーマLuxeritasのバージョンを3.6.13へアップデートしました。3.6.12.2では変化が無かったGoogleが"解析不能"と送ってきた問題が直るかどうか?です。8/24に書いたとおり、直らなくても通常は人が見ない(たどれない)URLなので実害はありません。
内容の詳細は開発元のいろいろ機能追加 + 内部処理最適化 Luxeritas 3.6.13(https://thk.kanzae.net/dev/wp-themes/luxeritas/t11766/)を参照してください。
後日追記)アップデートしてから再検証を依頼したところ、Googleより"サイト(https://kadono.xsrv.jp/)に関する「解析不能な構造化データ」の問題が修正されました"とメールが届きました。直ったようです。
Raspberry PiのmDNS (avahi-daemon)無効化
Raspberry Piでiptablesの設定を見直していてログに
IN=wlan0 OUT= MAC= SRC=192.168.xxx.yyy DST=224.0.0.251 LEN=215 TOS=0x00 PREC=0x00 TTL=255 ID=49523 DF PROTO=UDP SPT=5353 DPT=5353 LEN=195
というのが引っかかり5353/UDPが結構頻繁に出ているようでした。Googleで検索すると少し古いですけど、Debian 8のDNSの逆引きが遅いことへの対応 [Debian](https://dan-project.blog.so-net.ne.jp/archive/20151008)というページが見つかりmDNSのようです。インストールしたまま放置している/etc/nsswitch.confには
hosts: files mdns4_minimal [NOTFOUND=return] dns
という行がありました。"mdns4″だけは無いためクエリごとにパケットは発生していないと思います。ただ、Raspberry Pi(Zero WHは特に)はCPUやメモリに余裕が無いので以下のようにavahi-daemonを無効にして様子を見ることにしました。
sudo systemctl stop avahi-daemon.socket sudo systemctl disable avahi-daemon.socket sudo systemctl stop avahi-daemon sudo systemctl disable avahi-daemon
大量にDNSへのクエリが発生する昨年公開したXSERVERのaccess_log内IPアドレス欄をFQDNへ変換(Python3+threading編)(https://kadono.xsrv.jp/2018/07/03/6582)スクリプトに影響があるかもしれません。OSのバージョンや設定次第でしょうか。
Luxeritas 3.6.12.2へアップデート
Luxeritas 3.6.12を飛ばして3.6.12.2へアップデートしました。Googleから"解析不能な構造化データhttps://kadono.xsrv.jp/で問題が検出されました"とかいうメールが届いたのでひょっとしたらということで更新してみました。Googleのロボットが機械的に見つけた古いURLで現状で人が飛べるリンクは無いと思うのでそんなページに対して効果があるかどうかは不明です。
アップデート内容の詳細は開発元の不具合2点修正 Luxeritas 3.6.12.2(https://thk.kanzae.net/dev/wp-themes/luxeritas/t11757/)を参照してください。
Corsair Carbide 270Rへシリコンパワー SSD 960GBを移設
2016年に特価で購入してNASで使用していたSP960GBSS3S55S25FRをデスクトップの予備機に移設しようとしたのですけど、SATAケーブルのコネクタがL字型のものしかマザーボードに付属していなかったためケースと干渉していました。しょうがないのでストレートタイプのケーブルTK-SATA3-05を購入してきてようやくCorsair Carbide 270Rにきちんと固定できました。
 移設後のSSD。SSDに接続するSATAのコネクタがL字型ではケースと干渉していました。
移設後のSSD。SSDに接続するSATAのコネクタがL字型ではケースと干渉していました。
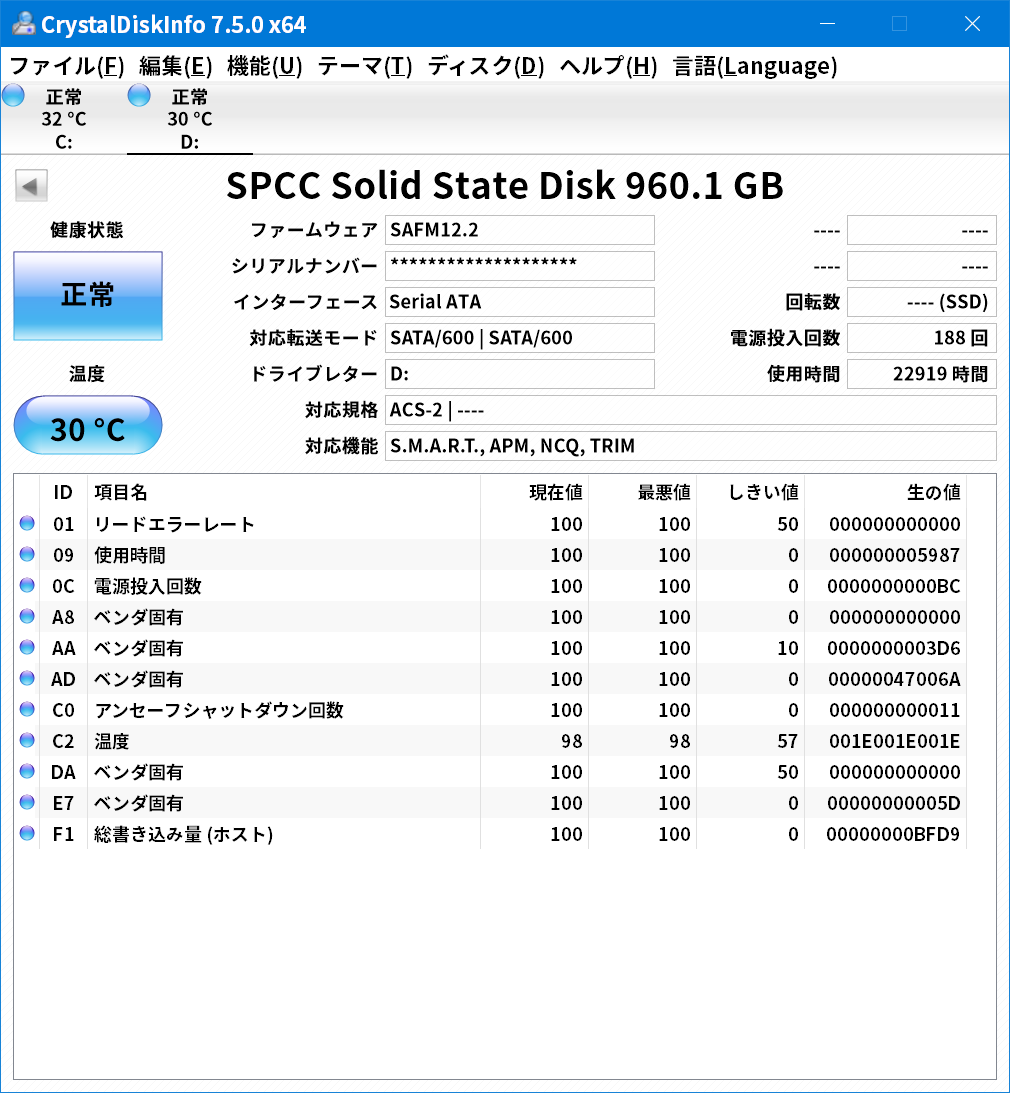 稼働時間を調べると22919時間で約955日でした。稼働時間の割に起動回数が少ないのはNASで常時ON使用だったからです。
稼働時間を調べると22919時間で約955日でした。稼働時間の割に起動回数が少ないのはNASで常時ON使用だったからです。
使用したケーブルは以下のサンワサプライシリアルATA3ケーブル 0.5m TK-SATA3-05です。
Luxeritas 3.6.11へアップデート
本サイトのWordPress用のテーマLuxeritasの3.6.9, 3.6.10をスキップして3.6.11へアップデートしました。大きな影響は無いと思いますがひょっとしたら不具合修正で細かく直っているかもしれません。
詳細は開発元のブロックの機能拡張その他 Luxeritas 3.6.11(https://thk.kanzae.net/dev/wp-themes/luxeritas/t11598/)を参照してください。
Luxeritas 3.6.8へアップデート
このサイトで使用しているWordPress用のテーマLuxeritasの3.6.7をスキップして3.6.8へアップデートしました。詳細は開発元の軽い機能拡張と内部調整など Luxeritas 3.6.8(https://thk.kanzae.net/dev/wp-themes/luxeritas/t11359/)を参照してください。
あと、画像の alt 属性の書き方(https://thk.kanzae.net/net/itc/t11199/)ですけど、このサイトでは画像のalt属性は意図的に削除しているため悪い例です。自動で入るalt=""だけでは無駄ですし、誰が読むのかわからないalt属性を考える暇があったら本文を考えます。画像は付録・補足という位置づけです。以前も書きましたけどこのサイトは検索ロボット向けではありません。
Luxeritas 3.6.6へアップデート
3.6.5を飛ばして3.6.6へアップデートしました。ブロックエディタをいじっている暇は無いのですけど細かい不具合修正も含んでいるようなので予防的に週一ぐらいではアップデートするようにします。
3.6.6の詳細は開発元の縦書きブロック追加とブロック入れ子機能追加 Luxeritas 3.6.6(https://thk.kanzae.net/dev/wp-themes/luxeritas/t11029/)を参照してください。
縦書きとか書式にこだわる余裕も無いです。というか、また下書きが溜まってきています。